My doctoral research, which started in the beginning of this year, investigates how robots could facilitate contact between groups in conflict. It uses a multidisciplinary approach, combining communication and media studies, social psychology, art, design, and robot engineering with one principal objective: reducing prejudice between the groups. Telepresence robots (robots that are remotely operated by humans) are increasingly used in social situations where face-to-face meetings are difficult to organize. Telerobots are being used in public services such as health care and education, as well as private-sector working places and residential homes. New demands for robotic avatars also surfaced in light of the COVID-19 pandemic, where physical distancing is imposed on society. Telepresence robots have not been used, so far, for intergroup contact.
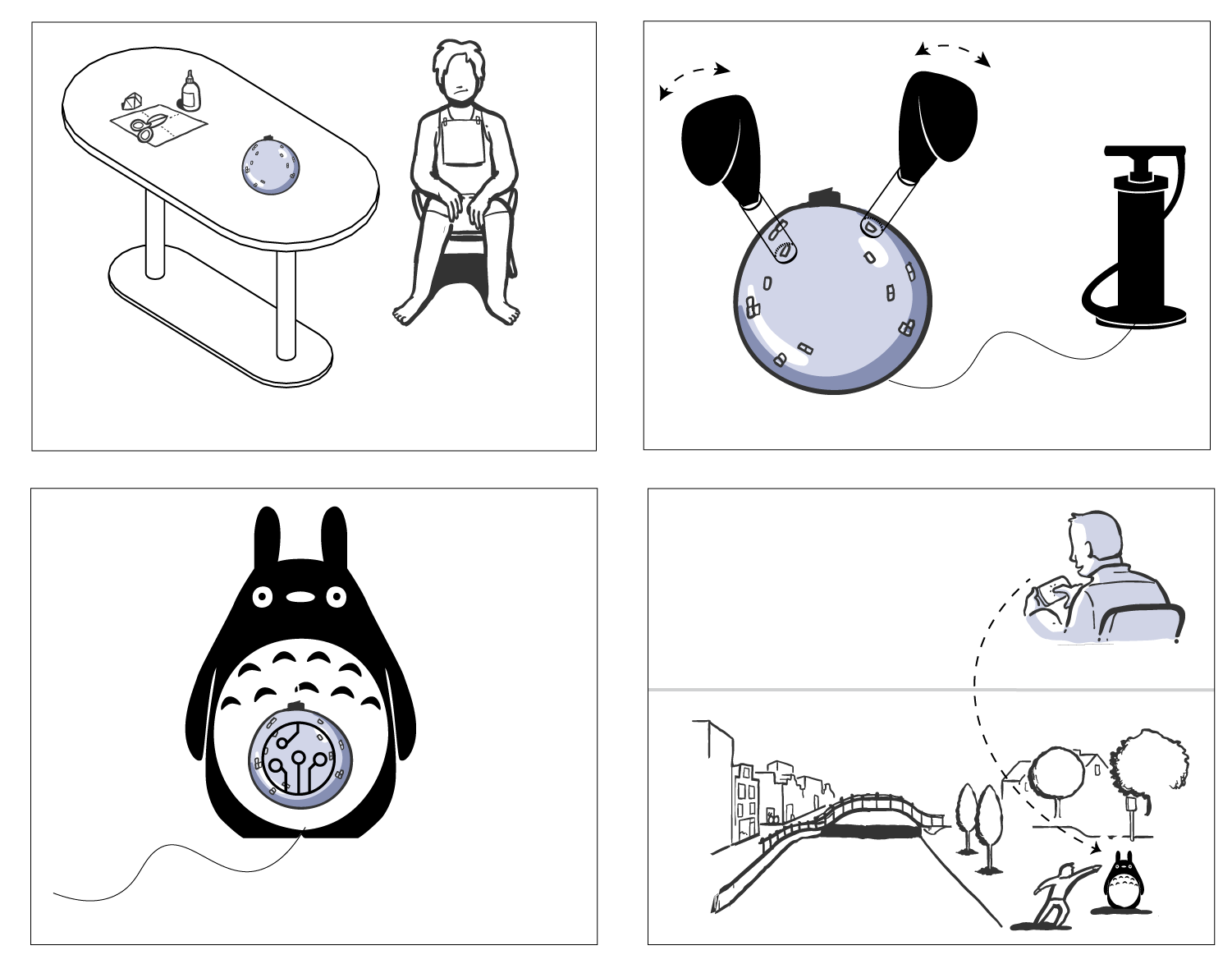
After a process of conceptualizing, I am now working on a robot avatar-making toolkit that allows inexperienced users to fabricate their robotic avatars, design their appearances and movements, and use them to occupy remote locations. The toolkit will include lessons learned in my Master’s thesis soft-robotic implementation, and move toward a new approach for textile-based, pneumatic-driven robots that are modular, easily customizable, and exhibit flexible motion.
Based on the developed toolkit, we will conduct workshops in Israel and Palestine and organize robot-mediated encounters and public-space appearances of robots from across the separation barrier.
The research is now fully supported by the Kone Foundation.
Avner Peled
Learning Environments Group.
Prof. Teemu Leinonen
Learning Environments Group.
Dr. Béatrice Hasler
VR-CORE Virtual Reality Lab for Conflict Research in IDC Herzliya research school, Israel
Meet the Creators
Would you like to hear more and talk to the creators of this project? Join the Zoom call after the presentations.
https://aalto.zoom.us/my/soft.robot